📖 Vrefを求める基本
- モーターの定格電流をカタログやデータシートで調べる
- モーターの目標電流(Irms)を決める。
- モータードライバのRsenseを調べる
💡 定格電流を調べる
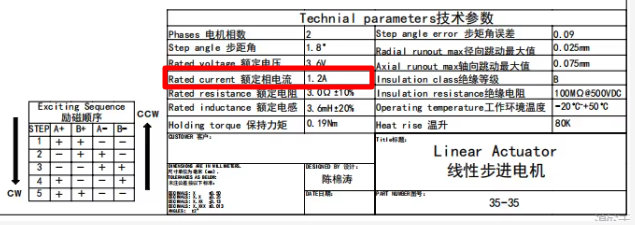
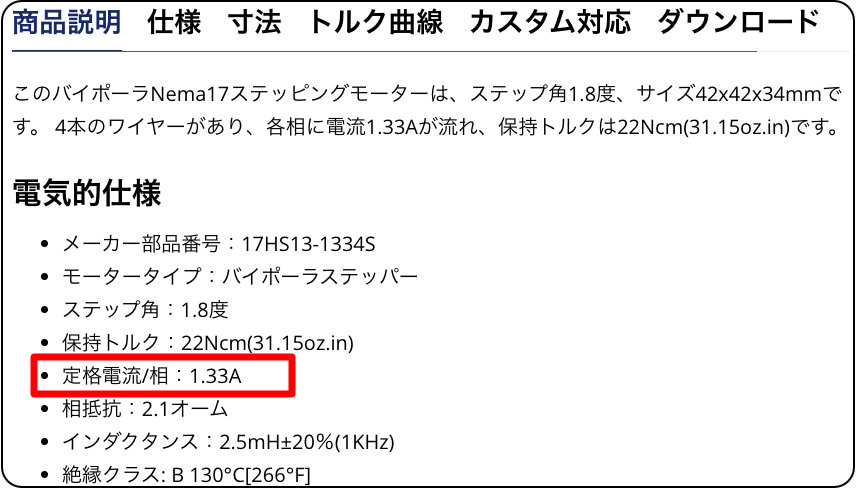
カタログやデータシートで定格電流の表記を探します。
⚡目標電流(Irms)の目安
発熱を抑え効率的な運用をするならモーターの定格電流の60〜80%くらいが良いと思います。70%を目標とした場合、モーターの定格電流が1.5AならIrms = 1.5 x 0.7 = 1.05Aとなります。曖昧に書いているのは、使用するモーターや環境で変わるからです。実際は実機の発熱・トルクを見ながら微調整する必要があります。目標を60%くらいから少しずつ上げていくのが良いです。
🔧 Rsense(センス抵抗)とは?
ステッパーモータードライバ(例:A4988, DRV8825, TMC2209 など)はマイクロステッピング制御のために電流制限(チョッパー制御) を行います。その電流を「どれだけ流れているか」を判断するためにモーターコイルとドライバの間に非常に低い抵抗(Rsense)を置いて電圧を検出します。
📘ドライバ別のRsenseの典型値
| ドライバ | Rsenseの典型値 |
| A4988 | 0.05Ω〜0.1Ω |
| DRV8825 | 0.1Ω |
| TMC2209 / TMC2208 | 0.11Ω |
| LV8729 | 0.1Ω or 0.22Ω |
🔍 実際のRsenseの調べ方
ドライバICの近くに二つ同じ値の抵抗があります。その値を調べます。小さいので老眼の方には非常にキツイですが💦
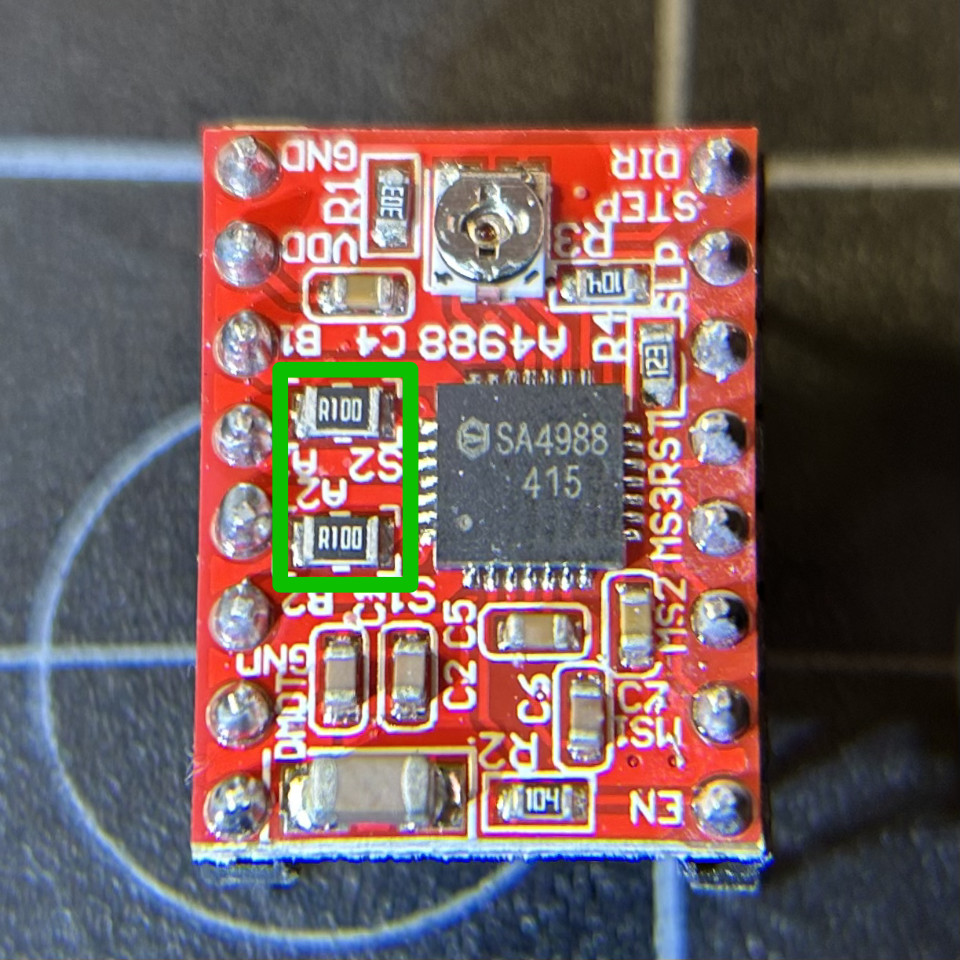
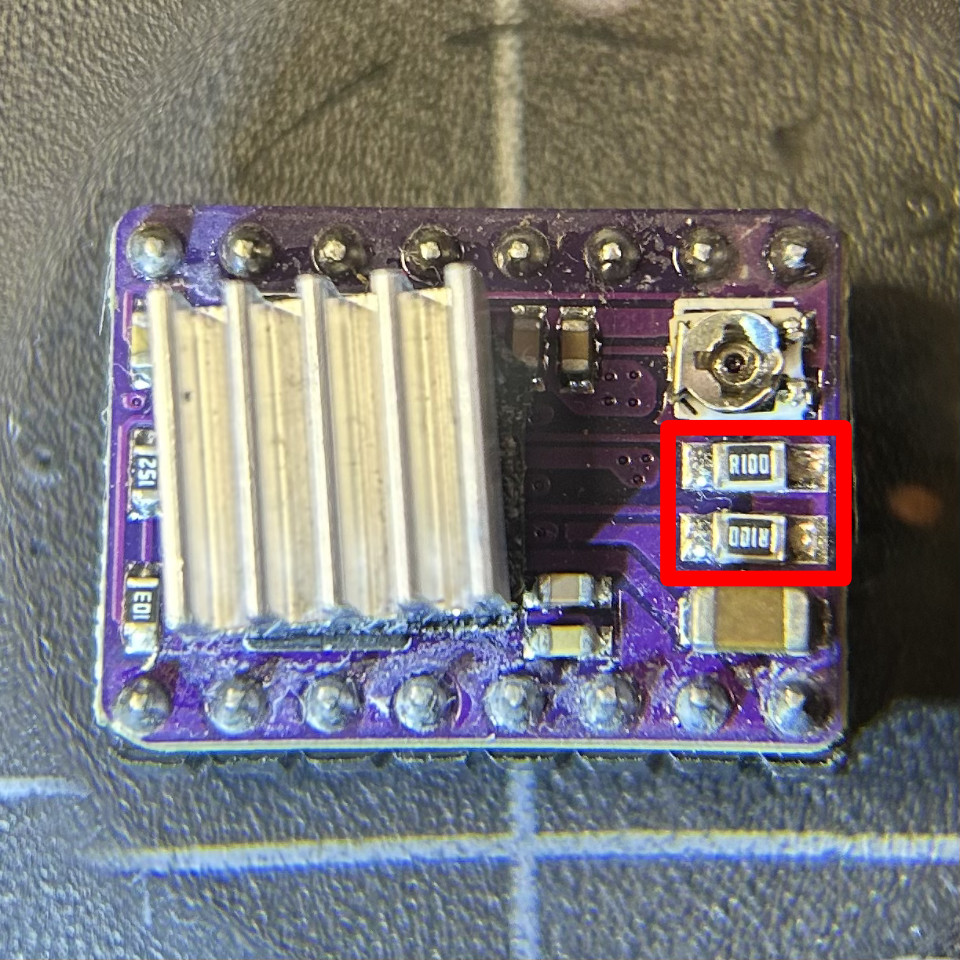
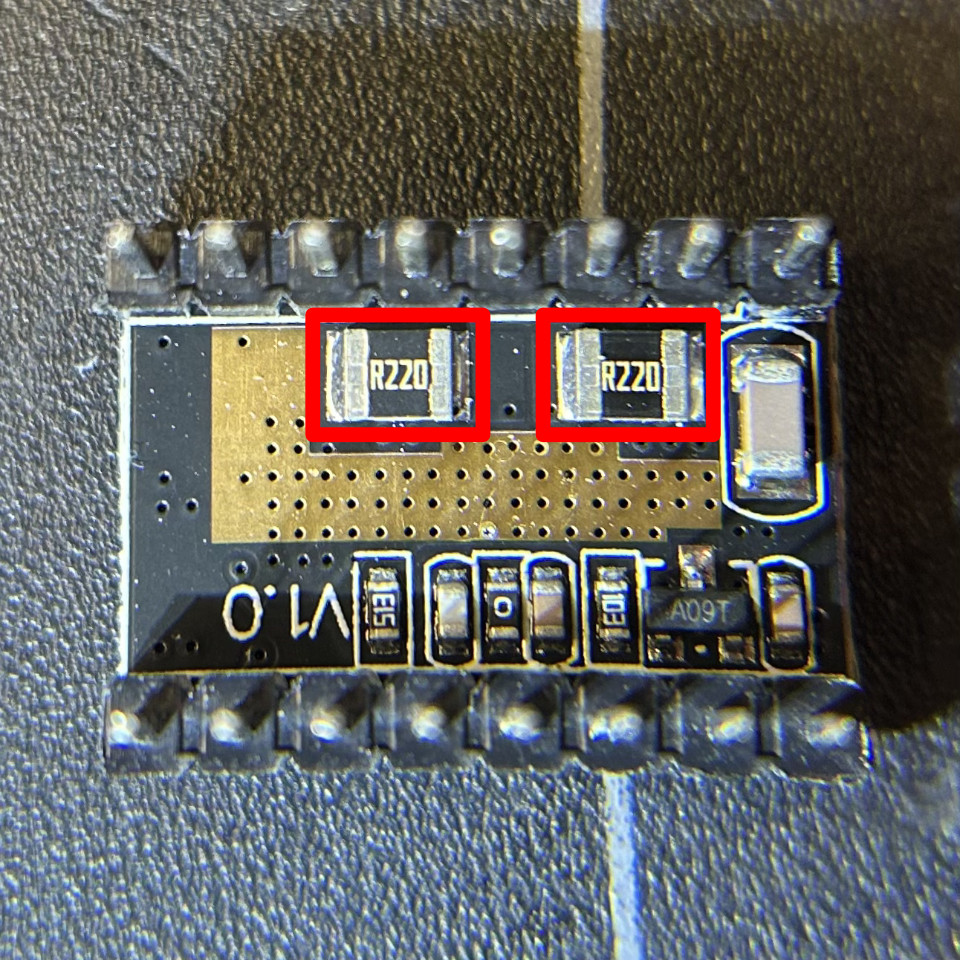
※R100 = 0.1Ω, R220 = 0.22Ω
🧮 Motor Driver Calculator
Vref および UART 設定計算ツール
Vref Calculator (Vref 計算)
TMC2209 UART Settings (Irms / CS 計算)
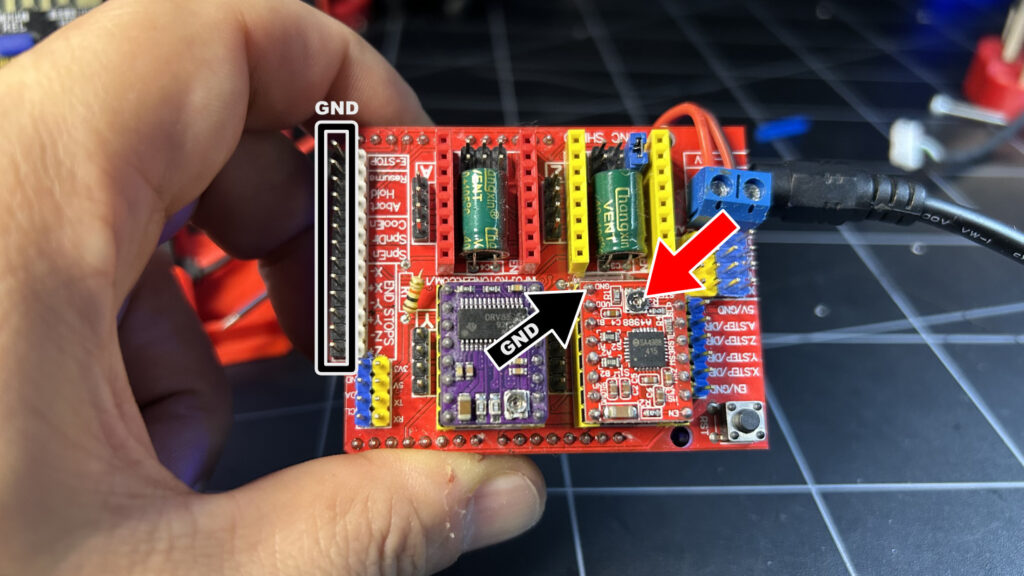
⚙️ Vrefの設定方法
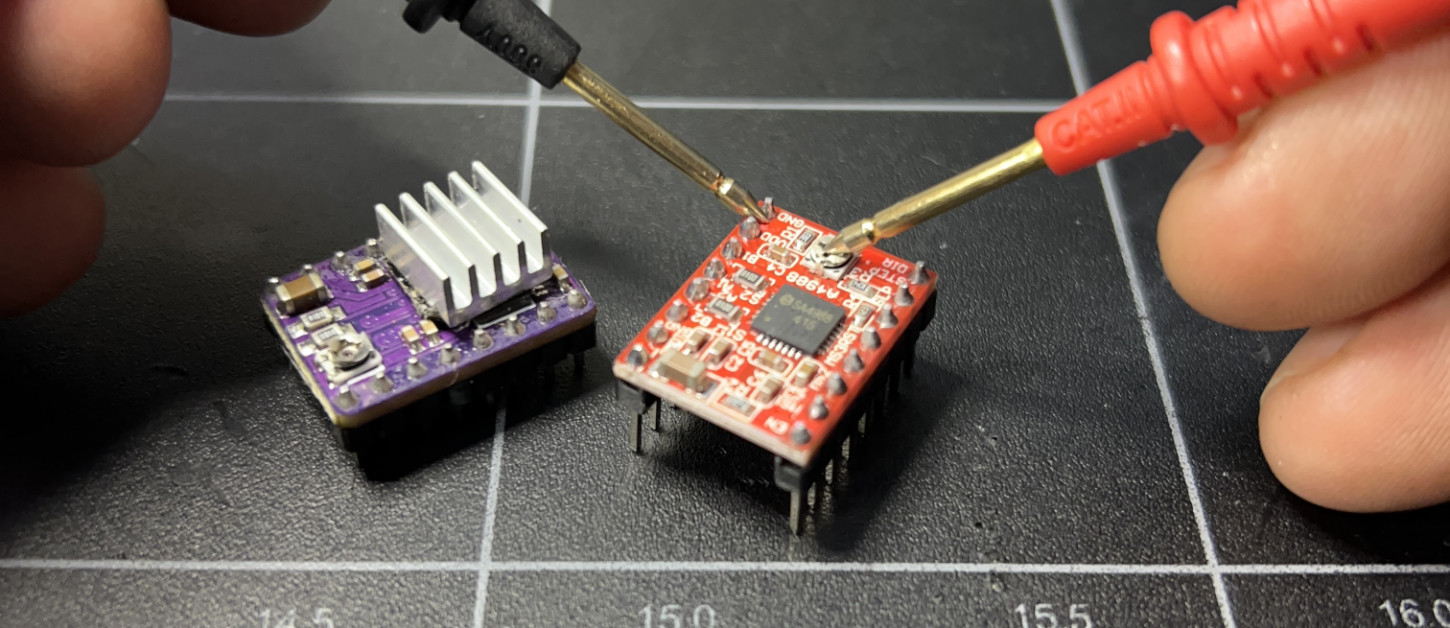
CNC3を例に説明します。まずはモーターを接続せずに基板に通電します。初めてドライバを設定する場合は想定以上の設定になっていた場合モーターを壊す可能性があるので注意してください。テスターの赤(プラス)端子をドライバ上の可変抵抗に当てます。黒(マイナス・アース)端子をドライバ上のGNDまたは基板上のGNDならどこでも良いので当てます。
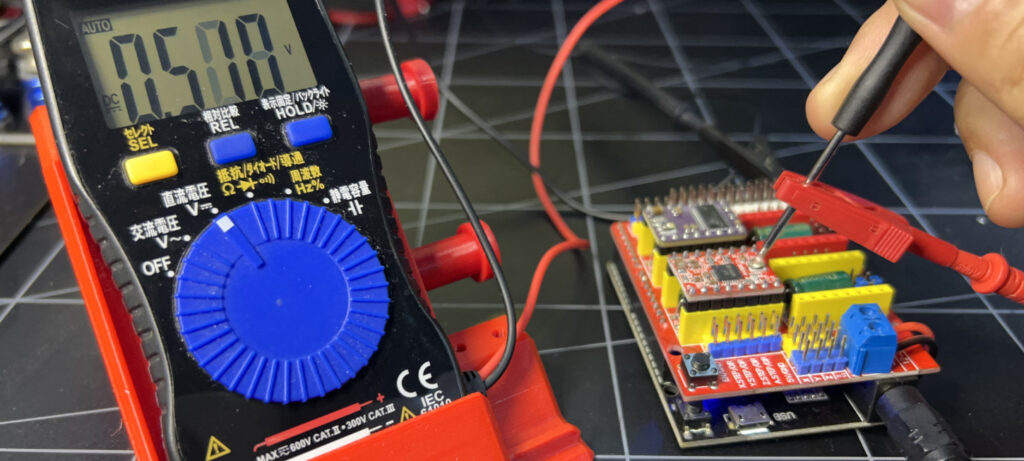
次のイメージのように赤端子にワニクリップをつけて精密プラスドライバを挟んで、回しながら数値を見ながら調整すると簡単です。
🔗 UART接続について
TMC2209、TMC2226は、UART接続が可能です。簡単に説明すると線1本で、マイクロステップの設定、電流調整などができてしまいます。
OnStepXでは、MaxESP4ボードがUART接続に対応しています。スルー時に大きい電流、トラッキング時は中くらいの電流、静止(スタンバイ)時は小さめの電流を流す等、効率的な運用が可能になります。
#define AXIS2_DRIVER_IHOLD 400 // スタンバイ電流(mA) 任意
#define AXIS2_DRIVER_IRUN 600 // トラッキング電流(mA) 任意
#define AXIS2_DRIVER_IGOTO 800 // スルー電流(mA) 任意定格電流の何%を流すかをmA単位で指定するだけです。
この記事へのコメントはありません。